




How It Works
THE BODYSHELF:
Participants' bodies are supported by and can move within a supporting structure/furniture form called the Bodyshelf. Part wedge, part shelf, this unique sculpture encourages particular forms of motion that is then detected by a variety of embedded sensors and video motion tracking. Because it is an unfamiliar furniture form it requires a short period of learning to master. This interface design develops an experience that is both performative and improvisational in ways that are embodied as well as immersive. This creates an unusual visceral/virtual mix that can be experienced by people with very different body types, different physical abilities and with various levels of engagement.
The two networked Bodyshelves allow two distinct modes of interaction. The bottom part of the shelf incorporates a foot navigation board and the back upper panel contains a series of sensors used to detect back presence and pressure. Each mode of interaction functions independently of the other. Two different types of body movement are possible.
1: Leaning forward from the hips, shifting body weight on the footboard interface.
2: Leaning back and shifting back pressure - picked up by sensors mounted into the backboard interface.
The Bodyshelf structure was designed and constructed by artist and furniture designer Zeljko Markov.
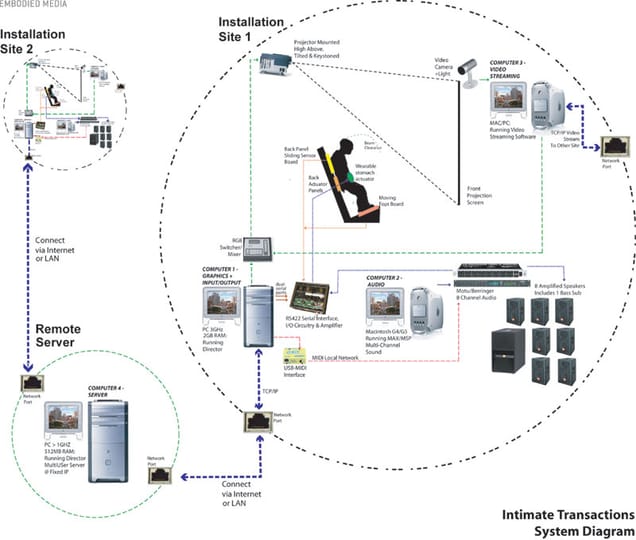
THE NETWORK:
The work is server driven and operates mostly asynchronously – i.e. there is one world model (running on the server), which connects two local spaces – which each participant experiences separately. Local spaces are populated by a participant, computational creatures AND a shadow of the other participant’s avatar (shown in the same position as it is in its own world).
What connects the ambience of the two spaces is a common property called VISCOSITY- a global value that is increased or decreased dependent on different types of person-creature and person-to-person intimate transactions. This value also has an affect on the overall speed and granularisation of the sound.The current value of viscosity affects the qualities of movement, speed and brightness of every creature and the responsiveness of the Bodyshelf.
Certain intimate transactions (eg observing but not ‘taking’ a creature’s images) have little effect on the current value of viscosity (local and global), whereas others (eg ‘taking’ images) change the value to differing degrees. A participant slowly discovers the effects of their transactions by returning back to the first space inhabited with creatures. In this way each persons’ experience of the work is quite different, yet is also linked by this common ‘atmosphere'.
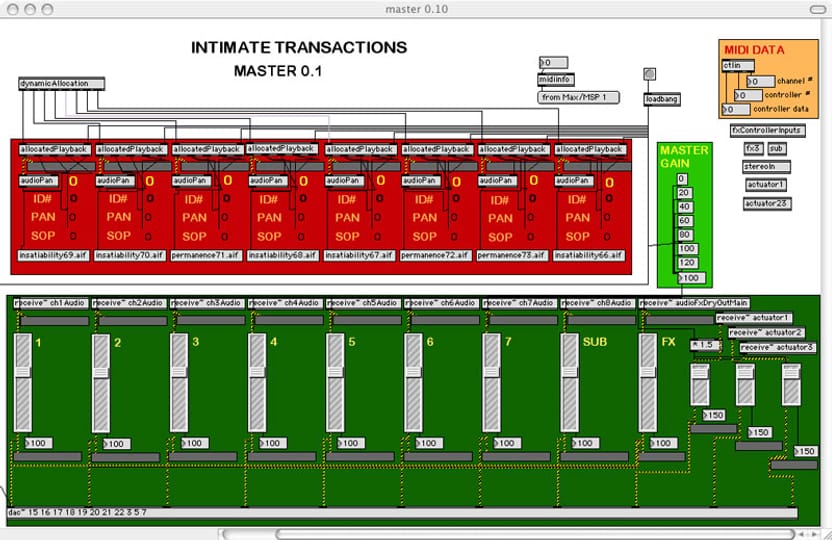
SOUND:
The aural landscape is presented in an eight channel surround sound format that fosters deeper understanding of the differences between the work's Creatures and the effect that each participant's transactions ultimately have across the entire networked system. Each creature has a different sonic personality, characterised by a particular collection of sound samples. These are linked to the Creature's images (seen in the Person to Creature Transaction Screen) which the participant manipulates by rolling their back-driven avatar. This directly manipulates different combinations of real-time digital effects allowing the user to form ideas about how their actions not only affect the individual creatures, but also how this ripples back to effect their the ambience of the Creature Space (and hence the other remote participant's Creature Space).
The programming for the audio is written in MaxMSP and controlled via MIDI. It responds to the movements of the user, interpreted by the action of sensors that they activate whilst moving upon the Bodyshelf. The degree of control this allows with the surround speaker array makes it possible for each participant to experience a vastly different range of spatial, visceral auditory sensations.
HAPTIC FEEDBACK:
The work also has an integral haptic component. Before getting onto the Bodyshelf each participant puts on a wearable device called the 'haptic pendant' which contains a vibrating actuator that is positioned on their stomachs. They also feel further vibrations through embedded actuators in the lower back panel which can be of different frequencies and intensities and create an intimate, internal feel.
When a participant approaches the other person's avatar in the first space (Creature Space) the level and quality of the vibrations felt in each person's stomach intensify, indicating the signature of that creature in relation to the overall level of viscosity within that space. The back actuators are used only in the third space (Person to Person) to sense the directional pull of other person sharing the movement of the dual controlled body curso